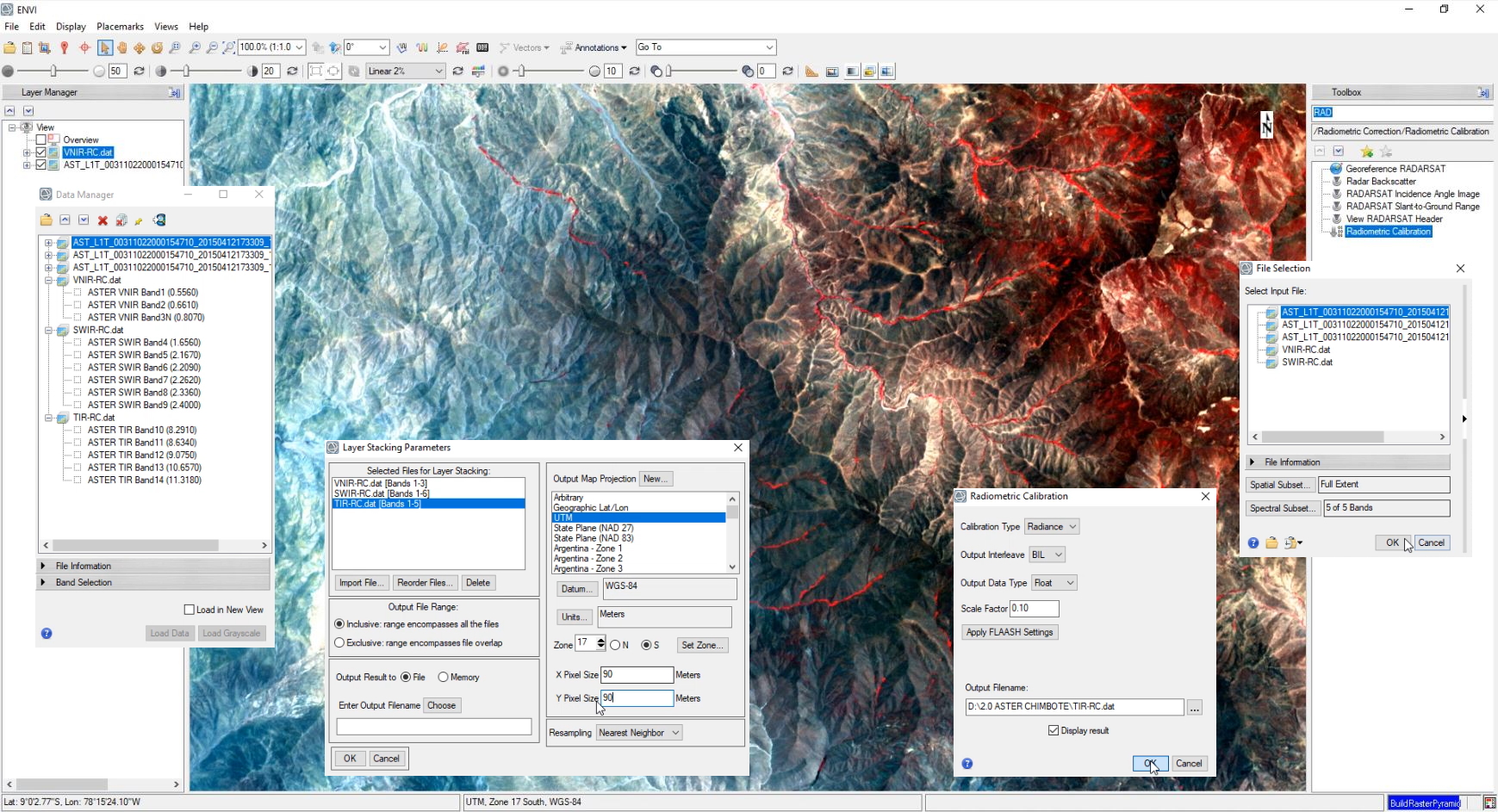
La calibración de imágenes es un paso previo al procesamiento común para los analistas de teledetección que necesitan extraer datos y crear productos científicos a partir de imágenes. La calibración intenta compensar los errores radiométricos de los defectos del sensor, las variaciones en el ángulo de escaneo y el ruido del sistema para producir una imagen que represente la radiación espectral verdadera en el sensor.
La herramienta de calibración radiométrica de ENVI ofrece opciones para calibrar las imágenes según las temperaturas de resplandor, reflectancia o brillo. Las opciones de calibración disponibles dependen de los metadatos que se incluyen con las imágenes.
Layer Stacking
Utilice Layer Stacking para crear un nuevo archivo multibanda a partir de imágenes georreferenciadas de varios tamaños, extensiones y proyecciones de píxeles. Las bandas de entrada se volverán a muestrear y volver a proyectar a una proyección de salida y tamaño de píxel seleccionados por el usuario. El archivo de salida tendrá una extensión geográfica que abarque todas las extensiones del archivo de entrada o abarque solo la extensión de datos donde todos los archivos se superponen.
Uno de los principales costos de un proyecto de exploración es el programa de perforación. La planificación de perforaciones en 3D basada en el conocimiento existente es una manera fácil de maximizar el valor de cualquier perforación futura y se puede lograr rápida y fácilmente en Leapfrog Geo . En este tutorial aprenderemos a través de los pasos necesarios para planificar una campaña de perforación en Leapfrog Geo, luego configurará un archivo de escena para que el equipo de campo pueda ver hacia dónde debe ir cada perforación, así como qué litología y grado se espera que intercepte.
El primer paso es definir el área de su proyecto; un buen comienzo es importar los datos existentes. Esto podría incluir una superficie topográfica, cualquier perforación existente, una fotografía aérea o un mapa geológico y datos GIS como lagos, ríos, caminos de acceso y límites de viviendas.
Una vez que haya importado los datos existentes, podrá comenzar a visualizar en 3D dónde es una ubicación adecuada para colocar su collar. Si ha creado algún modelo geológico o de ley, también puede visualizar dónde está su objetivo potencial.
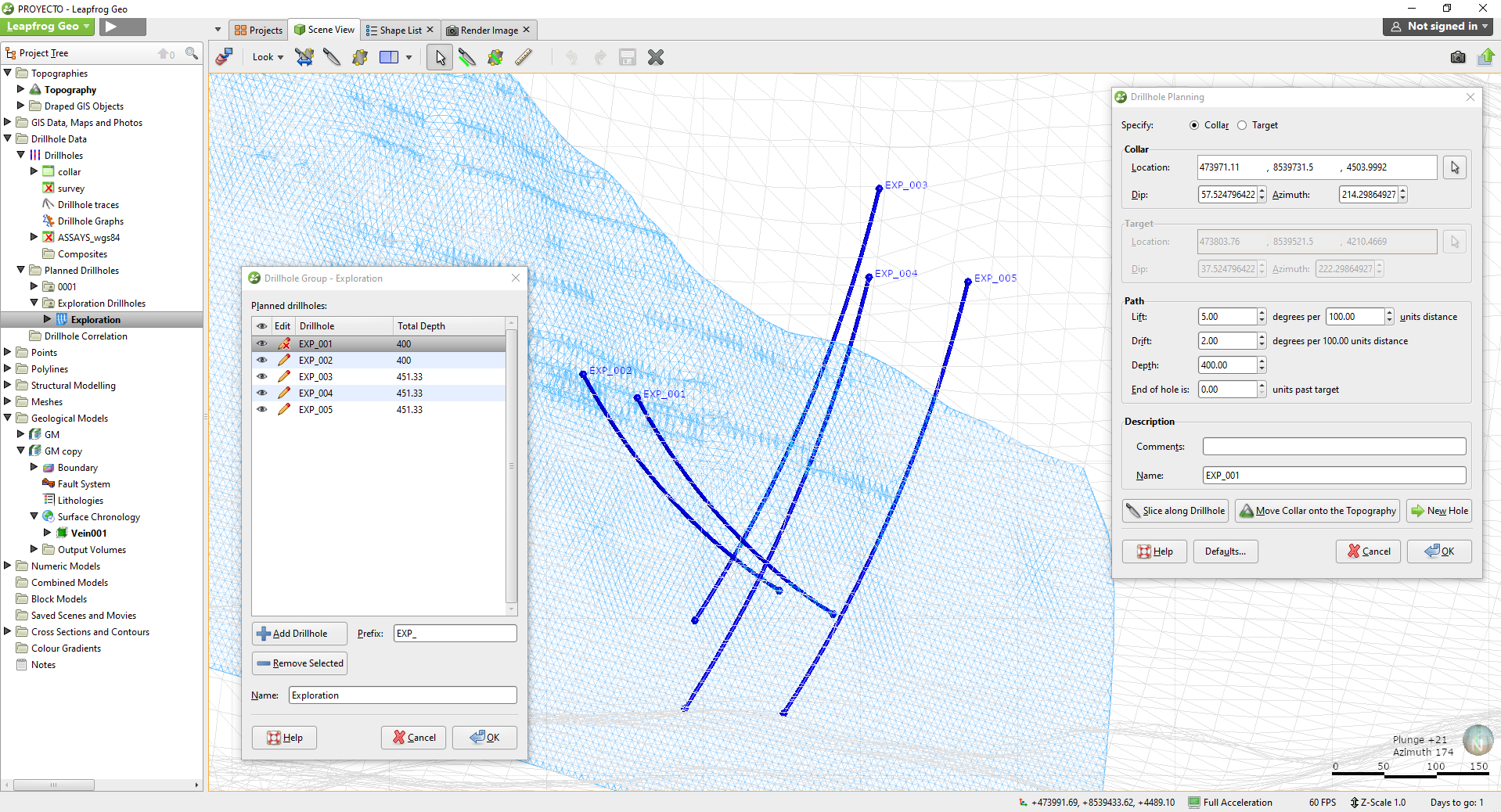
Para crear una perforación planificada, haga clic con el botón derecho en la carpeta ‘Perforaciones planificadas’ y haga clic en ‘Planificar perforación’.
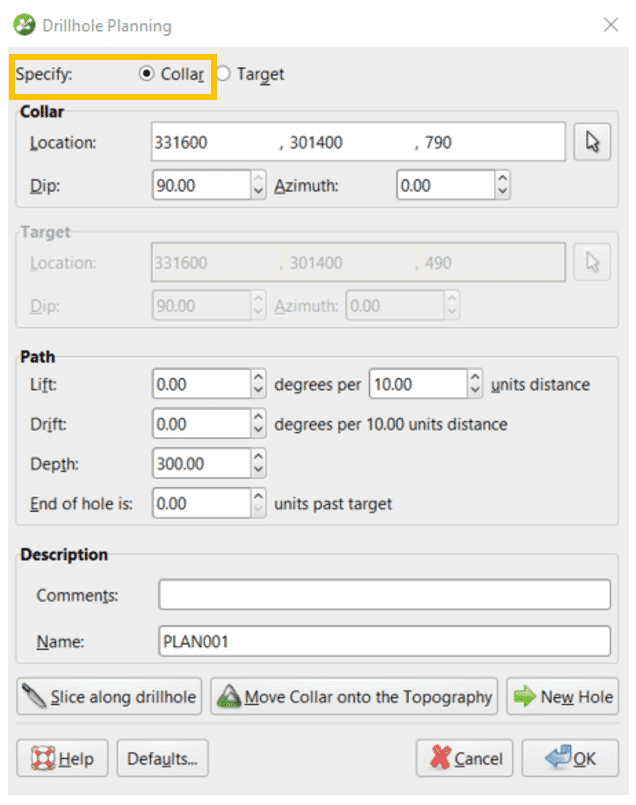
Hay dos opciones que puede elegir; puede especificar una ubicación de collar o una ubicación de destino. Especificaremos la ubicación del collar, ya que es más común tener un punto conocido en la topografía para colocar su collar.
Asegúrese de que la opción ‘Collar’ esté seleccionada en la parte superior de la ventana. Arrastre su topografía a la escena, así como un modelo geológico o de grado existente, si tiene uno.
Gire la escena para que pueda ver la ubicación del collar, así como el punto que le gustaría cruzar.
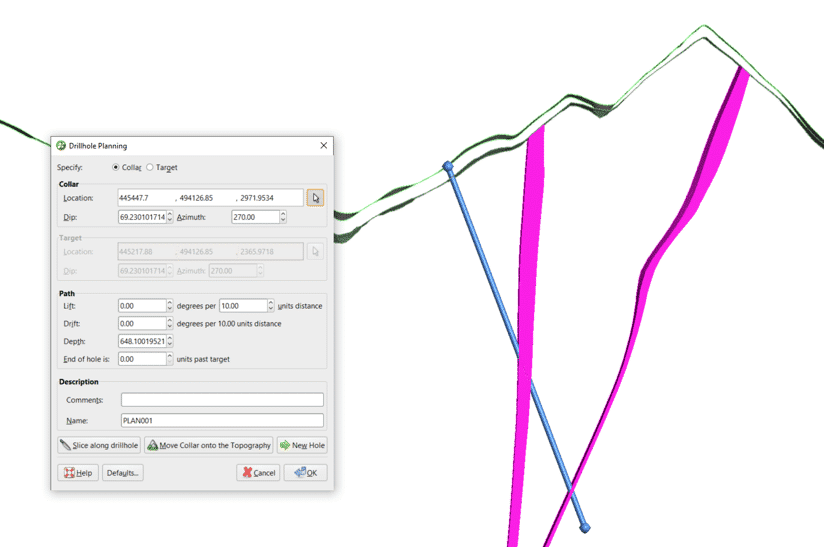
Haga clic en el icono del cursor en la ventana Planificación de perforaciones.
Haga clic en la ubicación de su topografía en la que le gustaría colocar su collar y arrastre el cursor a la ubicación de destino.
La ubicación, el buzamiento, el azimut y la profundidad, así como un nombre para el sondeo basado en la perforación actual, llenarán los campos en la ventana Planificación del sondeo.
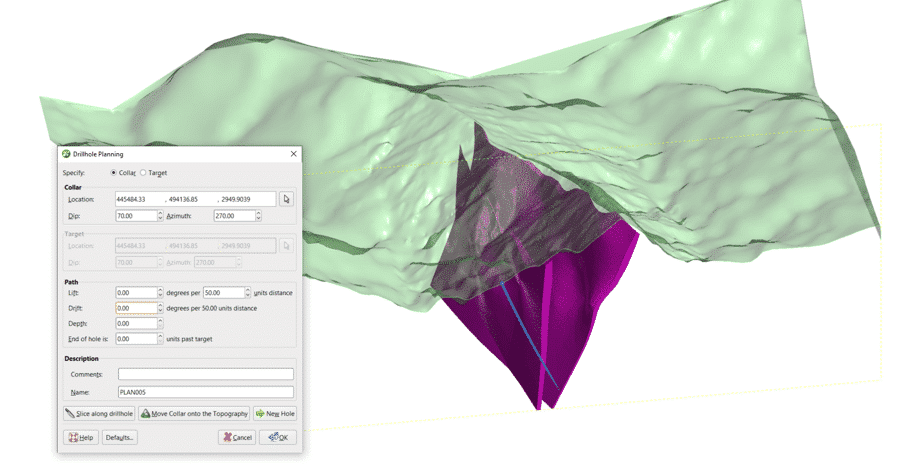
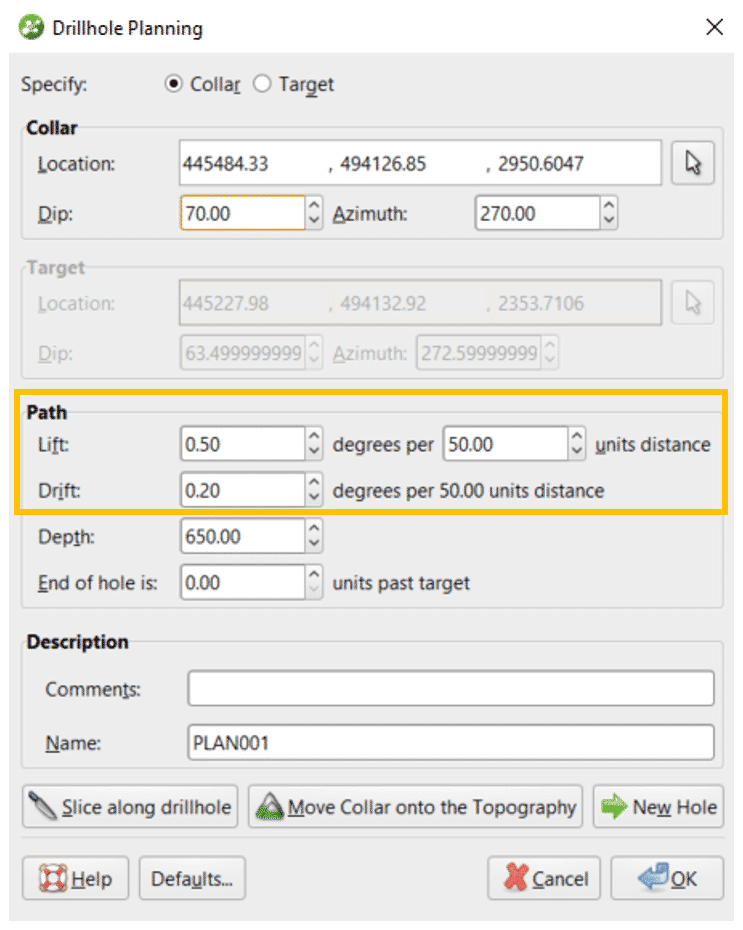
El último paso es especificar una elevación y desviacion adecuadas para su sondaje; estos se pueden ingresar manualmente según la tendencia de los sondajes anteriores. Cuando cambie la elevación y la desviación, verá que cambia la ubicación de su objetivo. Puede cambiar manualmente el buzamiento y el azimut en la superficie para asegurarse de que su sondaje intercepte la ubicación deseada.
Haga clic en Aceptar
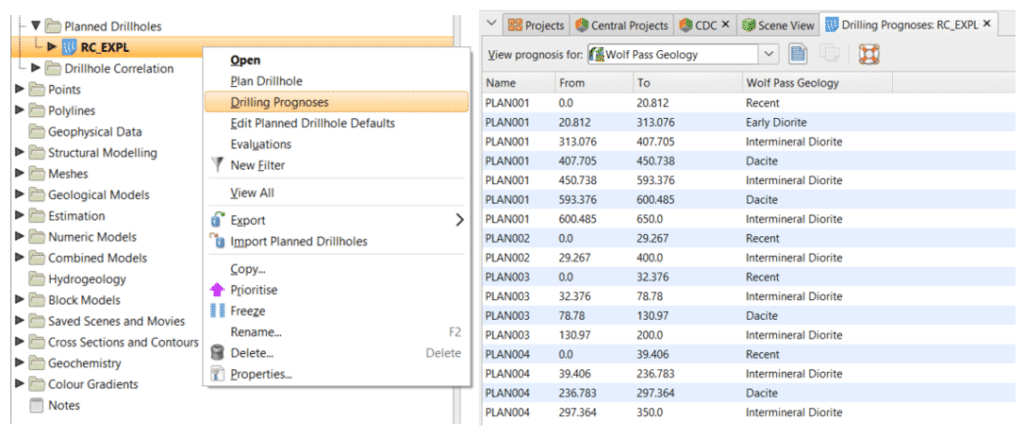
Drilling Prognoses (si ya tiene un modelo geológico previo)
Una vez que haya planificado su sondaje, haga clic con el botón derecho en el árbol del proyecto y seleccione ‘Drilling Prognosis’ para ver la litología esperada o la ley de fondo de pozo según el modelo actual de Leapfrog.
Puede establecer la elevación y la desviación por defecto haciendo clic derecho en la carpeta Planned Drillholes y seleccionando «Edit Plan Drillholes Defaults». En la ventana que aparece, puede especificar los valores predeterminados para la elevación y la desviación, así como otras opciones.
Uno de los valores predeterminados más útiles es la opción «Desplazamiento al siguiente sondaje», que le permite establecer la distancia y el acimut predeterminados para el siguiente sondaje. Esto puede resultar muy útil para planificar una cerca o una cuadrícula de perforaciones. En el siguiente ejemplo, la distancia predeterminada al siguiente pozo se ha establecido en 50 m, y también se ha establecido la dirección entre los sondajes, así como el buzamiento y el azimut de cada pozo. Una vez que se hayan creado estos ajustes predeterminados, haga clic en el botón «Siguiente agujero» para crear el siguiente sondaje planificado, luego repita hasta que se hayan planificado los agujeros deseados.
Exportación de un buzamiento y un azimut de ubicaciones
Una vez planificados los sondajes en 3D, se pueden exportar a un archivo csv para utilizarlos en el campo. La información exportada incluye todos los detalles del sondaje planificado.
Esto está escrito para aquellos que tienen problemas para modelar vetas con datos fragmentados, especialmente muestras de canales.
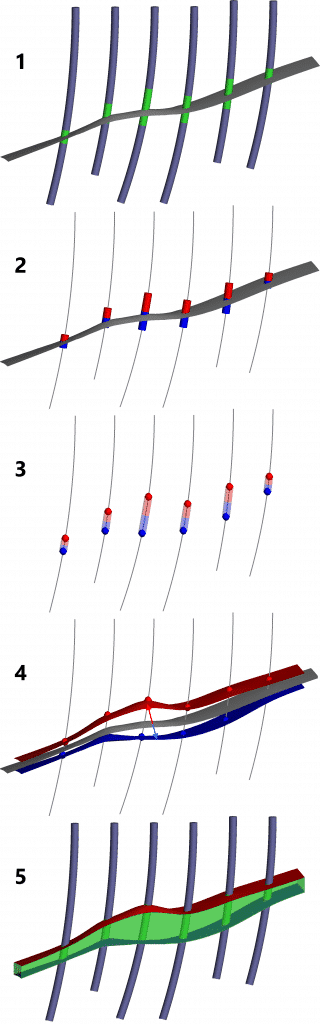
La herramienta de vetas de Leapfrog Geo fue diseñada para trabajar con datos de sondajes, idealmente perforaciones que intersecan ambas paredes de la estructura de veta tabular. Si está utilizando la herramienta de modelado de vetas con datos de muestra de canal fragmentados, encontrará útiles estos consejos y trucos. Cómo funciona la herramienta de vetas Para empezar, vale la pena comprender cómo funciona la herramienta de vetas. Consulte la figura 1 a continuación.
1. Primero, se genera una superficie de referencia a partir de los puntos medios de los intervalos de las vetas. 2. A los segmentos de veta se les asignan lados de pared colgante (HW) y pared de pie (FW) según su orientación a la superficie de referencia. 3. Se generan puntos HW y FW separados en los extremos de estos segmentos. 4. Se generan las superficies HW y FW; ambas son compensaciones de la superficie de referencia que se ajustan a los puntos respectivos. 5. El producto final es el volumen encerrado entre las superficies HW y FW.
Clasificación del segmento de veta
Debido a la forma en que Leapfrog Geo clasifica automáticamente los segmentos de vetas, podemos definir tres tipos básicos de muestras de vetas. • Las muestras de pared a pared están en el mismo agujero o canal y representan / tocan / intersecan ambas paredes de la verdadera estructura de la veta. • Las muestras de vetas incompletas son muestras que representan solo una pared de la verdadera estructura de la veta. • Las muestras de vetas internas no se cruzan con ninguna de las paredes verdaderas de la vena.
Figura 2. Grupos: Derecha = muestras de pared a pared, Izquierda = muestras incompletas, Centro = muestras internas
La estructura de la veta ‘verdadera’ está representada por el color verde claro, con las paredes representadas por las líneas marrones. Los intervalos verdes representan muestras de vetas registradas, los intervalos violetas representan muestras de «vetas externas» registradas, las líneas grises representan las secciones no muestreadas del pozo o canal.
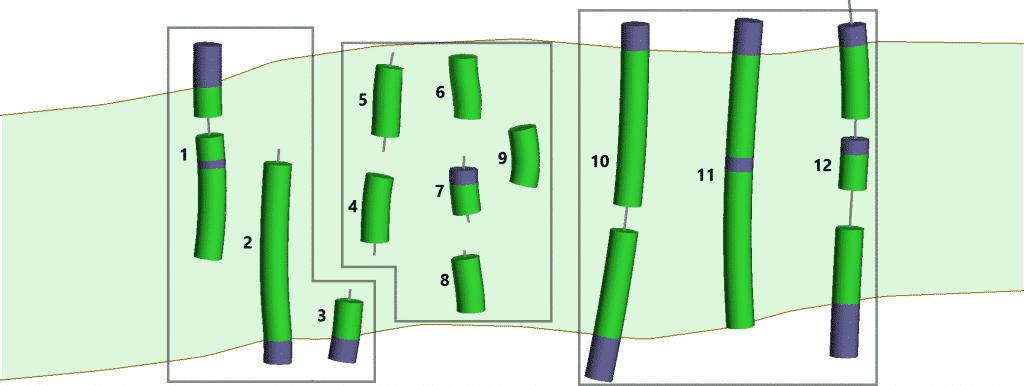
Como puede ver en las figuras 3 y 4, la clasificación automática de segmentos de vetas de Leapfrog Geo hace un buen trabajo con tipos de muestras de pared a pared, incluso cuando están muy fragmentadas como el último hoyo, pero no funciona tan bien con los tipos de muestra incompletos y tipos de muestras internas. Estos tipos de muestras internas e incompletas pueden producir triangulaciones superficiales deficientes porque las superficies están en contacto con cada uno de sus respectivos puntos finales de segmento. Las superficies de la pared colgante y la pared del pie pueden cruzarse entre sí, generando agujeros en el volumen modelado de la veta.
Figura 3. Resultados de la clasificación automática de segmentos de vetas de Leapfrog Geo. Cada extremo de segmento está representado por uno de estos tres tipos: Muro colgante (rojo), Muro de pie (azul) y Excluido (gris). Las triangulaciones de la superficie de la pared de la vena resultantes son verdes en esta imagen.
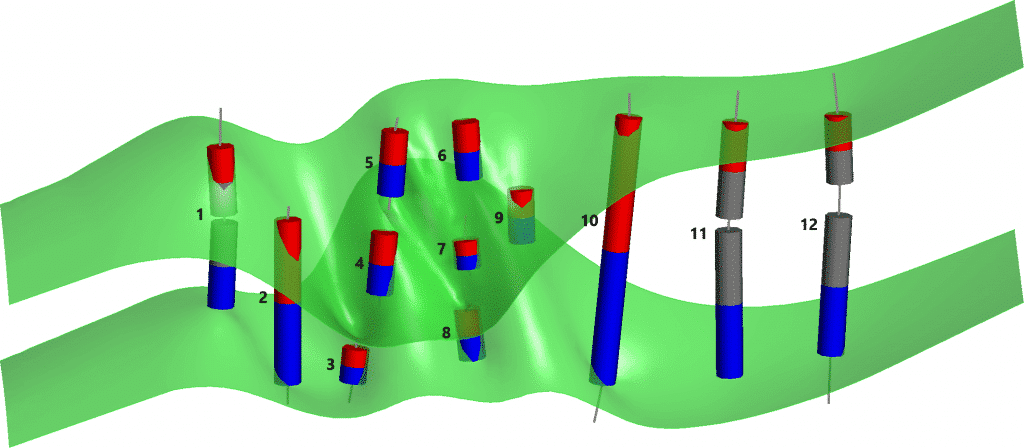
Figura 4. La clasificación ideal de estos segmentos de vetas. Todas las muestras internas se clasifican como «Excluidas». Se excluyen los extremos internos de los segmentos incompletos.
Edición manual
Con algunas ediciones manuales, puede lograr la clasificación de segmento de vena ideal en Leapfrog Geo.
Editar segmentos de vetas
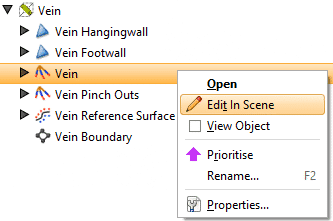
Para corregir los segmentos de vena en las muestras incompletas, deberá editar manualmente los segmentos de vena y anular sus clasificaciones automáticas. Haga clic con el botón derecho en los segmentos de la vena y seleccione Editar en escena (ver figura 5).
Figura 5. Para editar segmentos de vena, haga clic con el botón derecho en el objeto de segmentos de vena debajo de la vena en el árbol del proyecto.
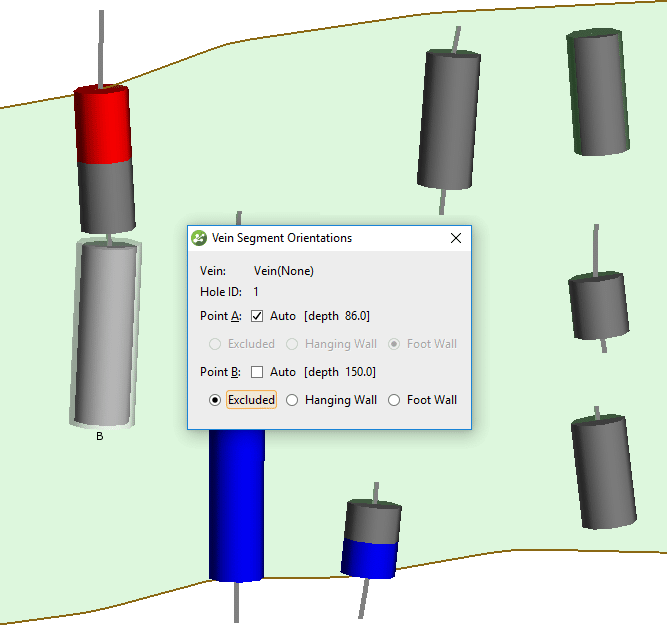
Haga clic en un segmento de vena, luego en el cuadro de diálogo Orientaciones de segmento de vena desmarque Auto para el punto (A o B) que es incorrecto. Fije el punto a la clasificación correcta. En el ejemplo ilustrado en la figura 6, el punto A del segmento parcial ha sido excluido por lo que será ignorado por las superficies de la pared de la veta. Repita esto para todos los segmentos de vena clasificados incorrectamente de muestras parciales.
Figura 6. Anule manualmente la clasificación de segmentos de vetas.
Ignorar muestras internas
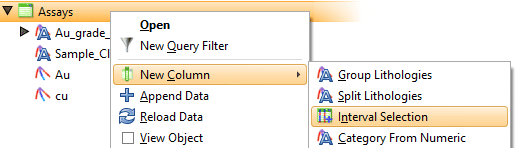
Puede llevar mucho tiempo anular manualmente la clasificación del segmento de vena, especialmente con muestras de vetas internas que deben tener ambos extremos de segmento (punto A y punto B) excluidos. Una forma de evitar esto es ignorar estas muestras con un filtro de consulta. Primero, deberá clasificar las muestras internas en la tabla de intervalos. Luego, cree una nueva selección de intervalo en la tabla de intervalos a partir de la cual se construyó su vena (consulte la figura 7).
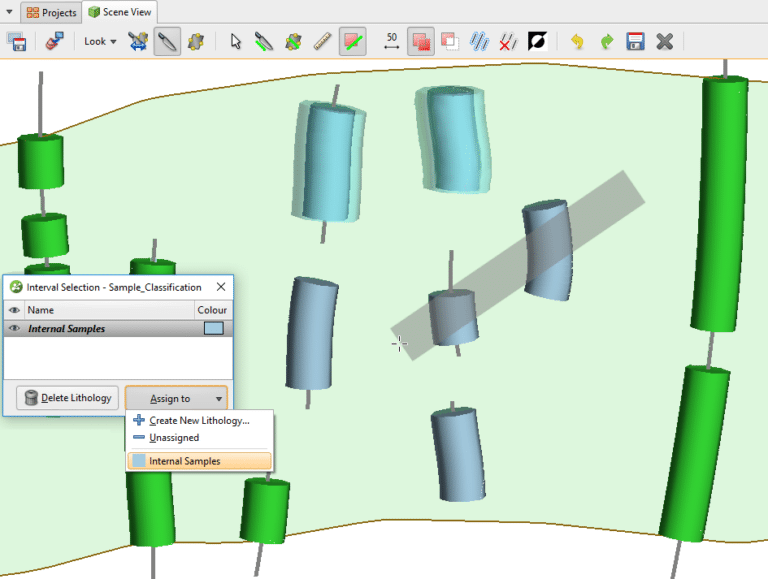
Seleccione y asigne todas las muestras internas a un nuevo código de ‘litología’ (ver figura 8)
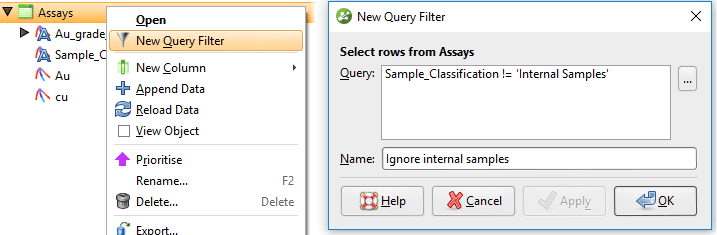
Una vez que se crea la columna de selección de intervalo, en la misma tabla de intervalo, cree un nuevo Filtro de consulta que ignore las muestras internas.
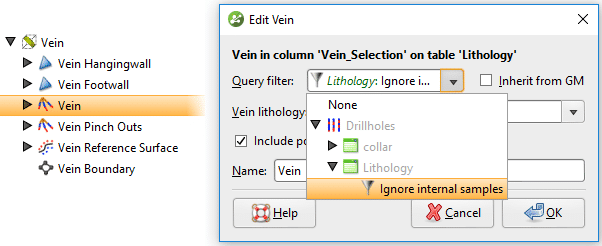
Figura 9. Cree un nuevo filtro de consulta que ignore las muestras de vetas internas. Para aplicar este filtro de consulta a la vena, abra los segmentos de la vena, desmarque la opción para heredar el filtro de consulta del GM (modelo geológico) y seleccione el nuevo filtro de consulta de la lista desplegable
Figura 10. Aplique un filtro de consulta a los segmentos de vena para ignorar las muestras internas.
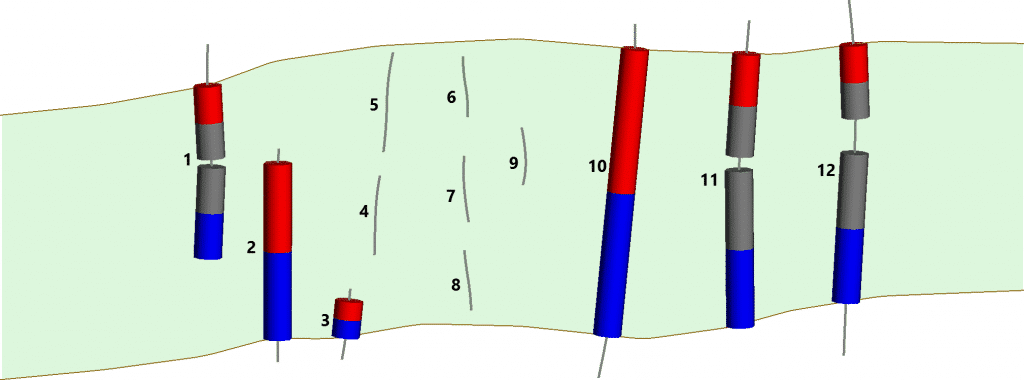
Figura 11. Resultados de la clasificación de segmentos de vetas de Leapfrog Geo después de ignorar las muestras internas
Ignorar puntos al final de los agujeros
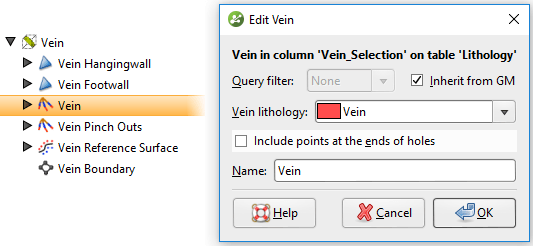
Dependiendo de los datos, es posible reducir el número de ediciones manuales excluyendo automáticamente los extremos del segmento al final de un agujero o canal. La configuración predeterminada para los segmentos de veta es incluir puntos al final de los agujeros. Para cambiar esta configuración, abra los segmentos de la vena haciendo doble clic (o haga clic con el botón derecho y seleccione Abrir), resaltados en naranja en la imagen, luego desmarque la opción para incluir puntos en los extremos de los agujeros (ver figura 12).
Figura 12. Desmarque la opción para incluir puntos en los extremos de los agujeros.
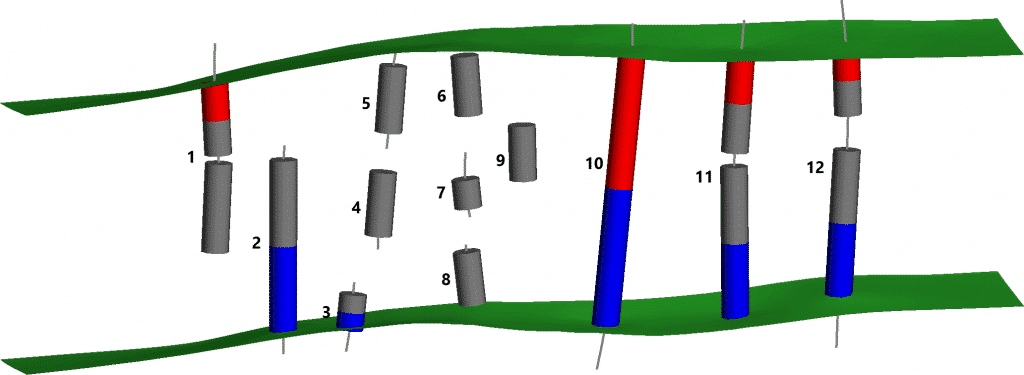
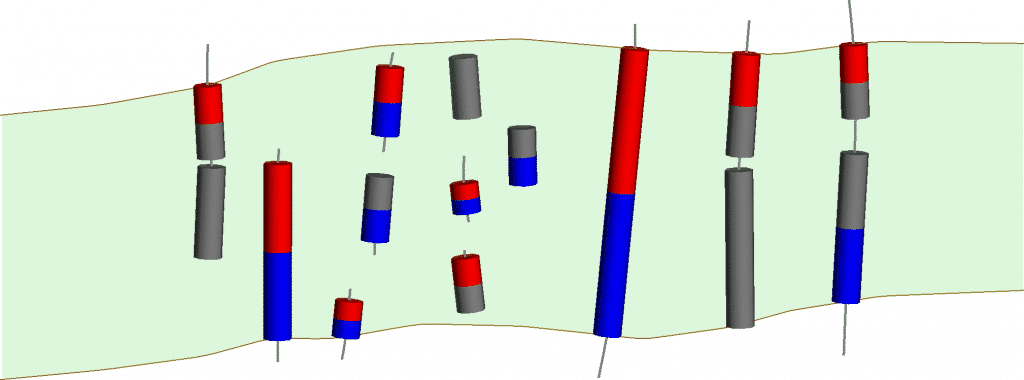
Figura 13. La clasificación automática de segmentos de veta que excluye puntos en los extremos de los pozos.
Como puede ver en la figura 13, los extremos de los segmentos de veta se excluyen al final de los orificios o canales. Esto ha resuelto el problema de clasificación de algunas de las muestras internas e incompletas. Sin embargo, si hay muchas muestras de vetas que se extienden hasta el final de los orificios (p. Ej., El orificio 11), o si la vena representa un caparazón de grado que debe encerrar firmemente todas las muestras de vetas, es posible que cambiar este ajuste no siempre sea apropiado
Conclusión
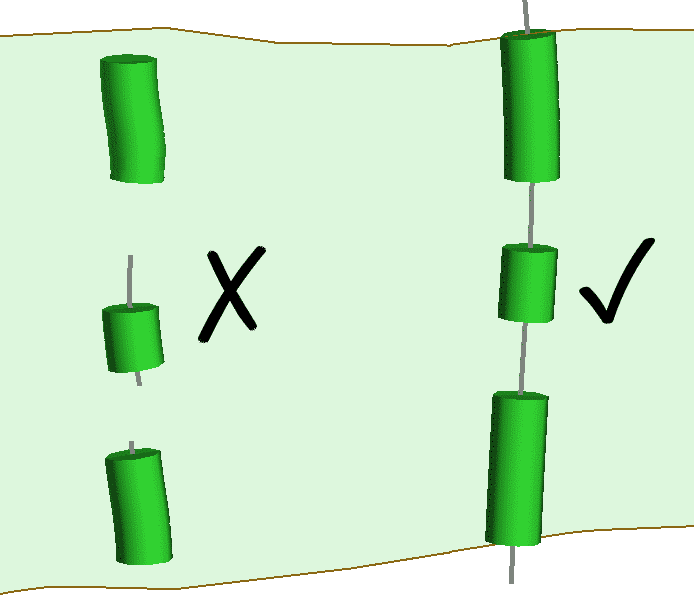
Con respecto a la clasificación automática de segmentos de vetas de Leapfrog Geo, el tipo de muestra de veta más recomendado para usar es de pared a pared. Incluso si el muestreo de pared a pared está fragmentado (separado por intervalos no registrados o intervalos sin vetas), la clasificación automática de segmentos producirá resultados apropiados. Con las muestras de canal, si las muestras de vena se pueden incluir en el mismo canal continuo, perpendicular a la estructura de veta tabular, puede minimizar o eliminar la necesidad de ediciones manuales en Leapfrog Geo (figura 14).
Figura 14. Muestras de canales fragmentados. Las muestras de la izquierda deberán editarse manualmente para producir una triangulación de vena razonable, mientras que las muestras de la derecha funcionarán automáticamente
Fuente: Leapfrog Geo
🚀 Aprende sin límites
📚✨ Ahora todos nuestros cursos exclusivos están disponibles en YouTube Miembros y Patreon.
Únete hoy y accede a contenido avanzado, guías especializadas y soporte directo. 🎥🔥